
Path Tracking For Car By Using Adaptive Model Predictive Control
Two different state space equations are applied for path tracking.
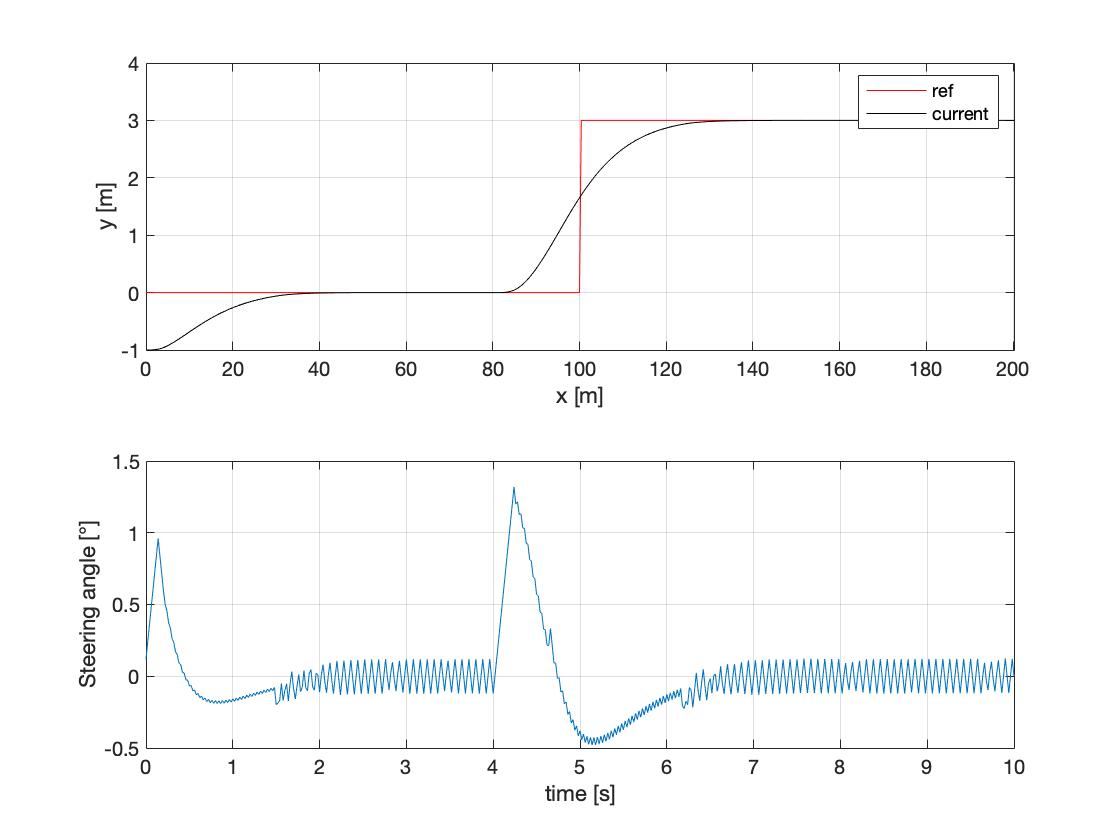
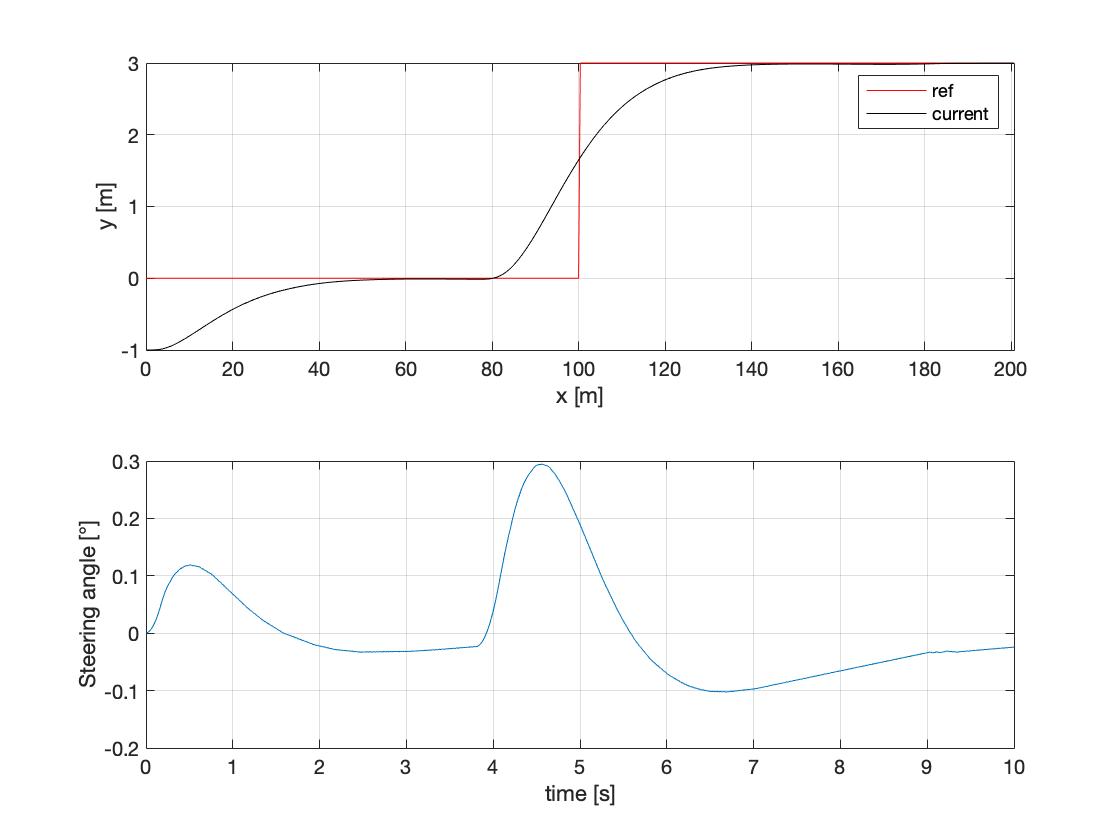
Compared to steering angle, the steering angle rate as controlled signal can make system more stable. It can be found in following figures.
Steering angle as controlled signal
Steering angle rate als controlled signal
Code
Ref:
License
MIT